3D camera can find its position in applications such as gesture control, face recognition, 3D object/space scanning, obstable detection, driving assistance.
We offer two types of 3D cameras: Time of Flight(ToF) camera and Structured Light camera. Their embedded SDK is ready for your second time development.
Our compact sized 3D cameras makes them easier to be integated into your products.
our ToF camera compare with a mouse
ToF Camera
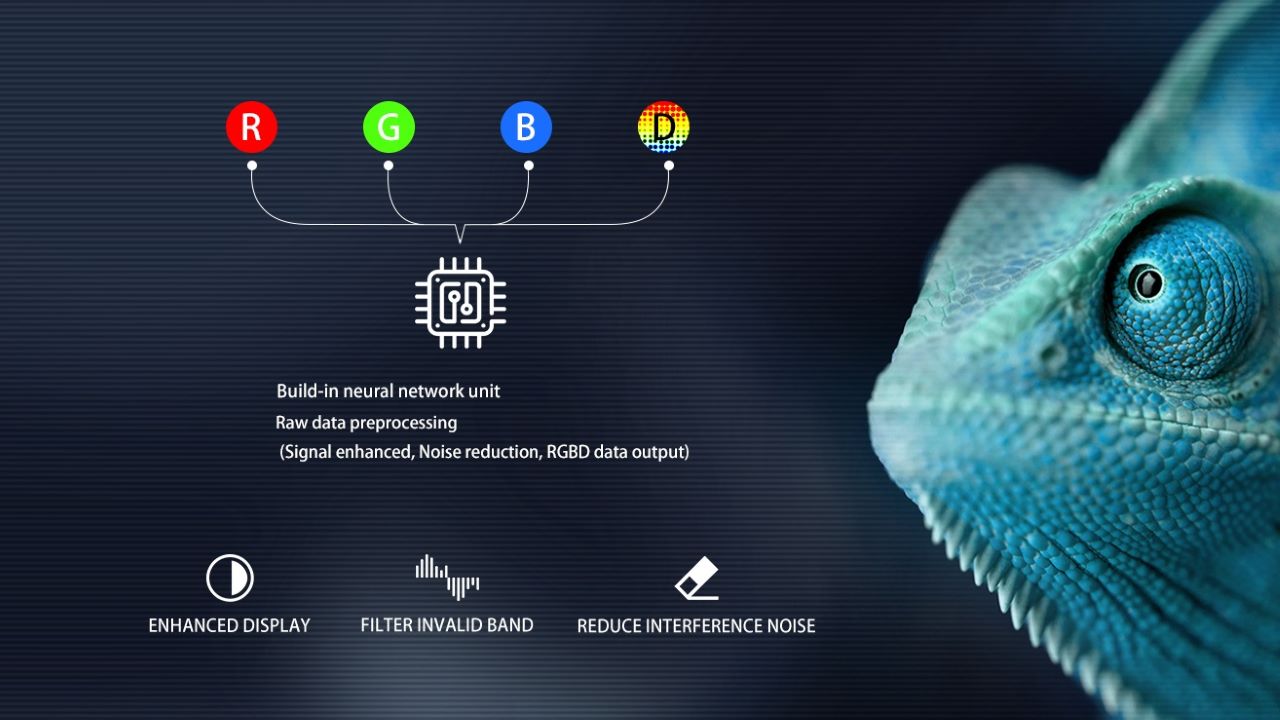
Below table shows the ToF camera specs. This 3D camera have both depth output and RGB output. Point cloud output is supported.
Parameters
Value
Information
Depth
RGB Color
Sensor
1/3.5 inch CMOS
1/3 inch CMOS
Field of View
62°(H)×45°(V)
71.5°(H)×40.6°(V)
Frame Rate
5-45 FPS
30 FPS
Resolution
224*172 pixels or 640*480 pixels
1344*760 pixels
Accuracy
≤1% distance(0.5m-4m @5fps)
≤2% distance(0.1m-1m @45fps)
Detection Range
0.1m-4m
IMU
supported, 6 axis
Operation Wavelength
850nm VCSEL
Power and Data
USB 3.0/2.0
Size
47.2mm(L)*29.6mm(W)*13.5mm(H)
Platform
Intel Myriad2 or Rockchip
Power Consumption
2.25W@15FPS
XYZ Point Cloud output
supported
Operating System
Linux Ubuntu 14.04, Windows7/8/10 X86/X64, Android4.3 and above
Structured Light Camera
Below table shows the main structured light camera specs we have. It is based on our second generation own designed depth IC IVP2000. Be aware, it does not have a RGB camera but a infrared camera.